Degree of Freedom is defined as the minimum number of independent variables required to define the position of a rigid body in space. In other words, DOF defines the number of directions a body can move. The degree of freedom concept is used in kinematics to calculate the dynamics of a body.
If DOF > 0 It’s a Mechanism
If DOF = 0 It’s a Structure
and If DOF < 0 It’s a Pre-Loaded Structure
Examples of DOF
Here are the examples of the use of DOF in various conditions:
Degree of Freedom of a Point in 2D Plane
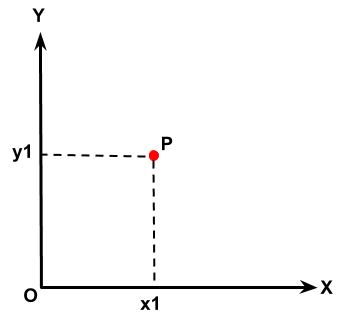
To define the position of point “P” in 2-dimensional space only its distance from the origin in the x and y-axis is required. Therefore point P has 2 DOF in 2-D space.
Degree of Freedom of a Line in 2D Plane
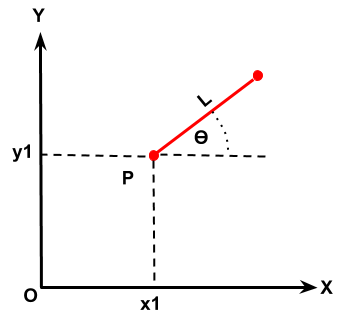
To constraint, the position of a line (L) or rigid body in 2-Dimensional space, its distance from the origin in the X and Y-axis and angle from x-axis is required. Therefore line (L) or rigid body has 3 DOF in 2D space.
Degree of Freedom of a Rigid Body in 3D Plane
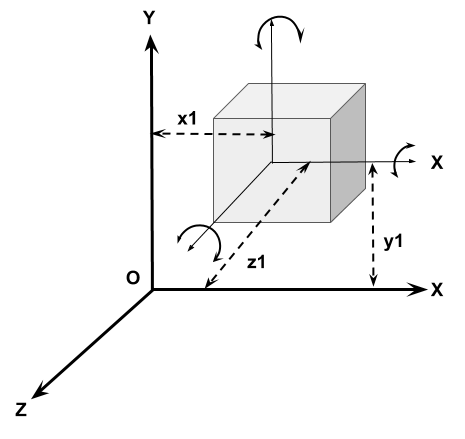
To define/constraint the position of a rigid body in 3-dimensional space. Its distance from the origin in the X, Y, Z-axis and angle from XY, XZ, YZ planes are required. Therefore a rigid body has 6 DOF in 3D space.
Degree of Freedom of Kinematic Links
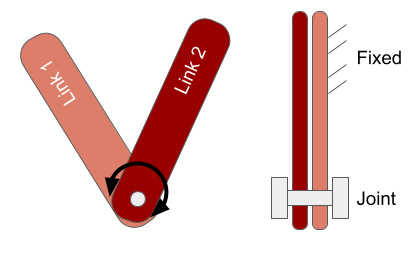
Kinematic links are used to transfer motion from one point to another point. One link is joined to another link by joints. These joints add kinematic constraints to the link.
Kinematic constraints between rigid bodies/Links result in the decrease of the degrees of freedom of the system.
Calculation of Degree of Freedom for a Kinematic Links
DOF of a kinematic link can be calculated using Grubler’s Rule.
Grubler’s Rule ( Degree of Freedom Formula )
DOF = 3 × (n-1) – 2×l – h
Where
n = Total Number of links
l = Number of lower pairs.
h = Number of higher pairs (If more than one input is required to constraint a link)
Four Link Mechanism DOF
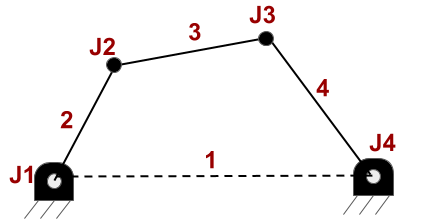
Number of Links (n) = 4
Lower Pair (l) = 4, Higher Pair (h) = 0
As per Grubler’s equation :
DOF = 3(n-1)-2l-h
DOF = 3(4-1)-2(4) = 1
Therefore input to any one link will result in the motion of all links.
Five Link Mechanism
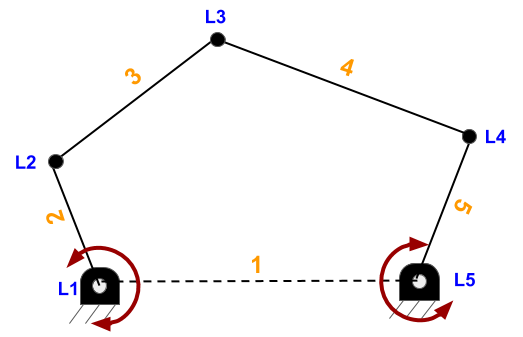
Number of Links (n) = 5
Lower Pair (l) = 5, Higher Pair (h) = 0
As per Grubler’s equation :
DOF = 3(n-1)-2l-h
DOF = 3(5-1)-2(5) = 2
Therefore two inputs are required to completely control the motion.
Three Link Mechanism with One higher pair Link
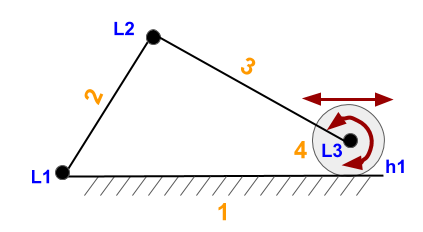
Number of Links (n) = 4
Lower Pair (l) = 3, Higher Pair (h) = 1
As per Grubler’s equation:
DOF = 3(n-1)-2l-h
DOF = 3(4-1)-2(3)-1 = 2
Therefore two inputs are required to completely control the motion.
Why we require Degree of Freedom of a Rigid Body
DOF of a body or a product is used to define its motion in free space. For example, if you are going to buy a new pick and place robot. First thing you look for DOF of a robot. It will help you in understanding what tasks this robot can perform for you.
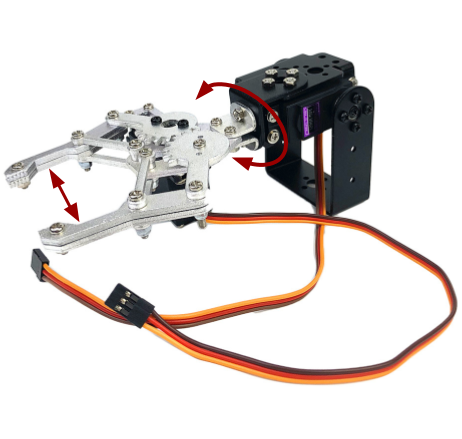
The above Robotic arm can rotate about an axis and can have horizontal motion. Therefore it has 2-DOF.
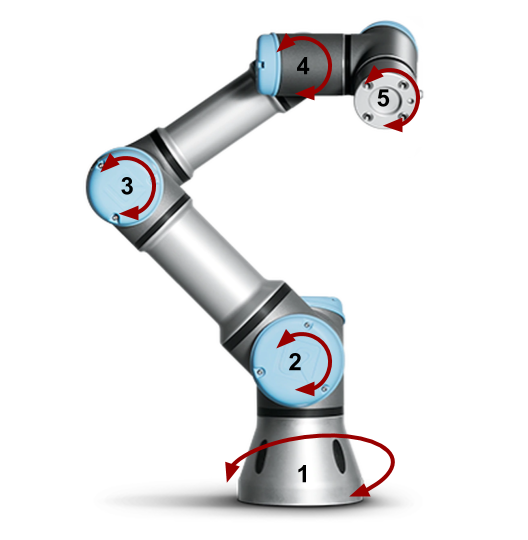
The above Robotic arm can rotate about five different axis. Therefore it has 5-DOF.
Commonly asked Questions on DOF
Yes, it is possible when a body is over constraint. For example in a truss structure, Extra links are added to reduce stress on existing truss members.
Writing on a paper or movement on carrom board are example of 2 DOF.
DOF in robotics defines, in how many directions a robot can move. For example robotic arm that can pick and place objects should have 4 DOF. Because it requires 4 motions:
- 3 axis motions to reach anywhere in 3D space.
- 1 axis gripper to pick and place object.
Higher the DOF of a robot. Higher will be the flexibility it will offer to control motions.
Grubler’s Rule can be used to calculate the DOF for a kinemetic link. According to Grubler’s Rule
DOF = 3(n-1)-2l-h
Where
n = Total Number of links, l = Number of lower pairs, h = Number of higher pairs
In a lower pair joint two elements of a pair are joined together with the surface contact between them
Whereas In a higher pair, only one point or line is responsible to form a joint between two links.
In a layman language. Only one input is required to constraint the motion of the lower pair joint. whereas more than one inputs are required to constraint the motion of higher pair joints.
A quadcopter exhibits 6 degrees of freedom because to control its motion we need to control six motions.
- Linear motion in X y and Z direction.
- Rotational Motion : Yaw, Roll and Pitch
To sum up, the DOF of a body or a product is used to define its motion in free space. To reduce the DOF of a body, kinematic restrictions are added to a body. We suggest you also read this article on the free body diagram.
We will keep adding more information on the degree of freedom in mechanics. Please add your suggestions comments or questions in the comment box.
Add a Comment