Pick and place, stacking, and sorting parts on the production line are repetitive and monotonous tasks. We can automate these tasks by using pick and place robots. This article will cover the basics of pick and place robots and guide you in selecting the best pick and place robot for your application.
What are Pick and Place Robots?
Pick and place robots utilize sensors, advanced vision technology, and a robotic arm to pick an object from one location and drop it in another.
They have applications in the manufacturing units to automate production processes and improve quality & productivity.
Types
Here is the list of different types of Pick and Place Robots available in the market. Each robot type and its advantages, limitations, and applications.
- Robotic Arm
- Cartesian Robot
- Delta Robot
- Collaborative Robot
1. Robotic Arm
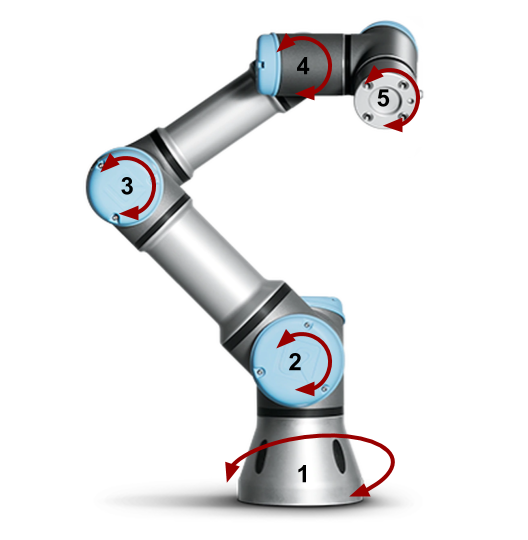
A Robotic arm is a programmable type of mechanical arm, similar to human arm. It is used in shop floor automation to pick object from one place and place it at another.
2. Cartesian Robot
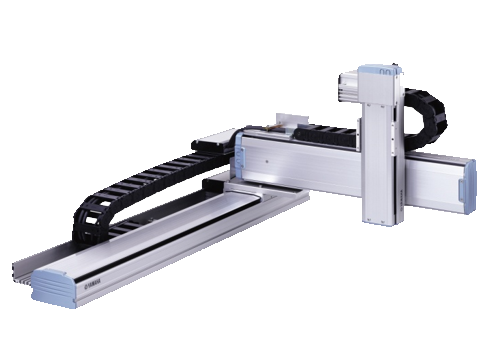
These robots have a linear motion on three axes (X, Y, and Z). Most 3D printers and CNC machines use these systems to position the end effector.
3. Delta Robot

A Delta robot is a type of parallel robot consisting of three arms connected to a universal joint at the base. They have applications to pick the products from a group and place them at another location.
4. Collaborative Robot
Cobot or collaborative robots are robots that share workspace with human beings. These robots have additional safety features since they work in collaboration with human beings.
Benefits of Robots on Production Line
Here is the list of the advantages of robots on the production line.
- High speed and consistency.
- Highly repeatable.
- High accuracy.
- Safety.
- Quick ROI.
- Increased productivity.
- Improved quality.
- Can automate monotonous and repetitive work.
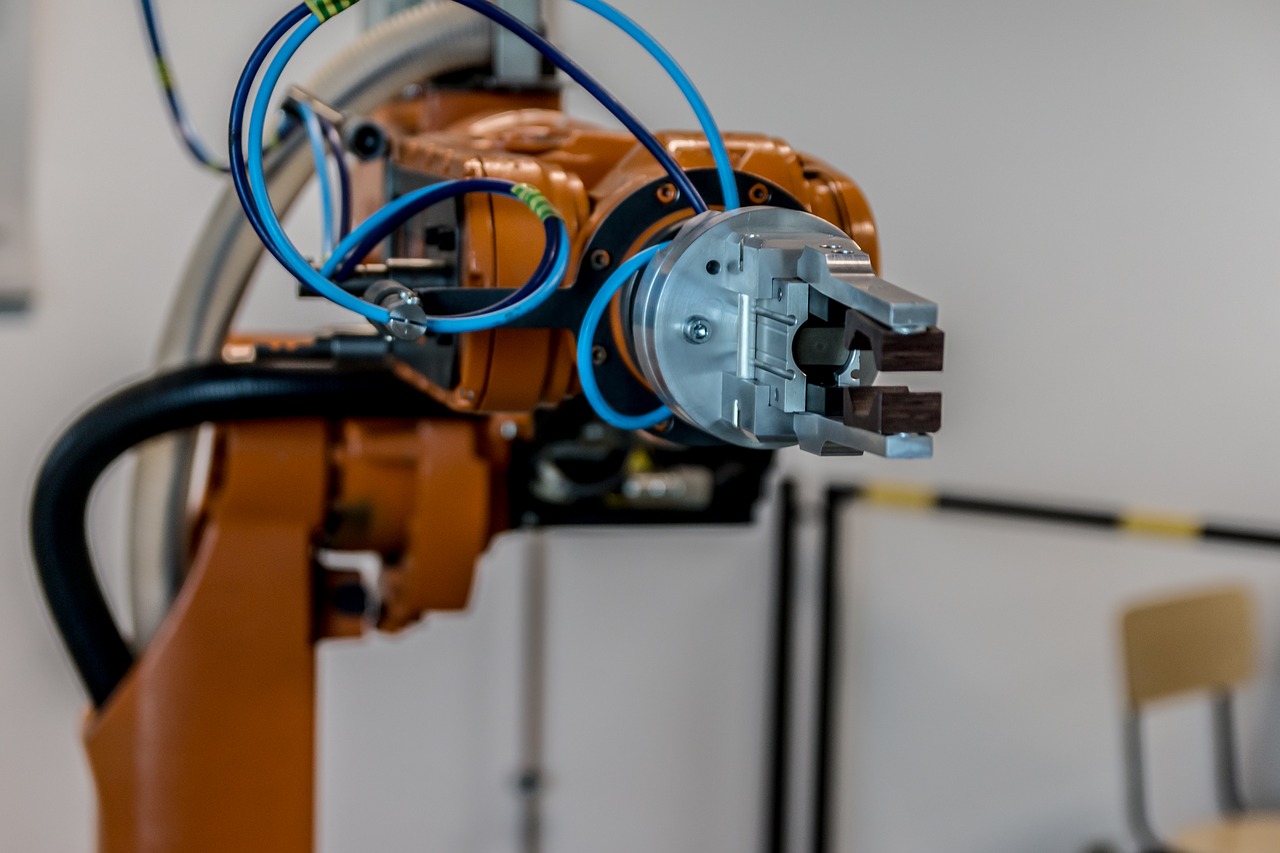
How do pick and place robots work?
Most pick and place robots are mounted at a fixed location in a way they can cover the complete workspace. The robot end arm is fitted with an attachment to perform the required operation.
These robots utilize advanced vision technologies and sensors with artificial intelligence technology to identify the part and place it at the desired location.
For example, a pick and place robot can pick the bottle cap from a fixed position, and put and tighten it on the bottle.
Applications of Pick and Place Robot
Here is the list of the applications of pick and place robots across various industries.
1. Pick & place, Stacking and Sorting
A Pick and place robot’s application is to pick objects from one location and place them in another, stack parts, and sort parts on the production line. For example, a pick and place robot has an application to pick components from the machine and place it on the conveyer belt.
2. Product Assembly
These robots are used to get the part from one location and assemble it on the product. For example, the pick-and-place robot application is to attach critical processors to the motherboard.
3. Part Inspection
Pick and place robots can verify the manufactured parts using go & no-go gauges and fixtures. And they can also reject the manufactured parts according to inputs from the vision quality inspection system.
4. Packing
These robots’ application is to grab the parts from the manufacturing line and place them inside the packing container.
How can we select the right Pick and Place robot?
Various types of pick and place robots in different configurations are available. Here is the list of points you should consider before selecting the best pick and place robot for your application.
1. Number of Axis
The number of axis of a robot determine the degree of freedom of the end effector. A higher degree of freedom means higher flexibility in the movement.
2. Work Volume
Work volume is the volume that the robot end effector or gripper can reach. In other words, it is the volume of space where the robot can work. It cannot go beyond its work envelope.
3. Speed
A robot determines how fast a robot can move from one position to another. The higher the robot’s speed, the faster the robot can move objects from one location to another.
4. Repeatability
It defines how accurately a robot can reach its position. Repeatability with accuracy determines how accurately a robot can work. For example, a robot with an electronics component assembly application will require higher accuracy than a robot sorting out parts from an injection molding machine.
5. Payload
It is the maximum load a robot can transfer from one point to another.
6. Factory layout and available space
Pick and Place robots are available in various size configurations and mounting arrangements. Engineers recommend considering the shop floor space availability before the selection of pick & place robots.
7. Axis Specification
A robot’s motion axis (Linear motion or rotational motion) has an impact on its selection. It determines the shape of the robot’s work area.
9. Protection Rating
Your factory working conditions and application type also impact the pick & place robot selection. Therefore you should consider maximum and minimum working temperature, IP rating, and exposure to chemicals before selection of pick and placing the robot.
We will keep adding more information on Pick and Place Robots. Please add your suggestions, comments, or questions in the comment box.